
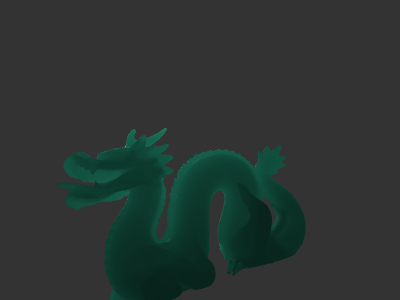
oglplus/028_depth_map_sss.cpp
Shows depth-map-based simulation of subsurface scattering
Copyright 2008-2014 Matus Chochlik. Distributed under the Boost Software License, Version 1.0. (See accompanying file LICENSE_1_0.txt or copy at http://www.boost.org/LICENSE_1_0.txt)
#include <oglplus/gl.hpp>
#include <oglplus/all.hpp>
#include <oglplus/shapes/obj_mesh.hpp>
#include <oglplus/shapes/wrapper.hpp>
#include <oglplus/images/image_spec.hpp>
#include <oglplus/opt/resources.hpp>
#include <oglplus/opt/list_init.hpp>
#include <cmath>
#include "example.hpp"
namespace oglplus {
class DepthProgram
{
private:
{
VertexShader vs;
vs.Source(
"#version 330\n"
"uniform mat4 CameraMatrix,ModelMatrix;"
"in vec4 Position;"
"void main(void)"
"{"
" gl_Position = CameraMatrix * ModelMatrix * Position;"
"}"
).Compile();
FragmentShader fs;
fs.Source(
"#version 330\n"
"void main(void)"
"{"
"}"
).Compile();
Program prog;
prog << vs << fs;
prog.Link().Use();
return std::move(prog);
}
public:
Uniform<Mat4f> camera_matrix, model_matrix;
DepthProgram(void)
: Program(make())
, camera_matrix(prog(), "CameraMatrix")
, model_matrix(prog(), "ModelMatrix")
{ }
};
class ShapeProgram
: public Program
{
private:
{
VertexShader vs;
vs.Source(
"#version 330\n"
"uniform mat4 LightMatrix, ModelMatrix;"
"uniform vec3 LightPosition;"
"uniform vec3 CameraPosition;"
"in vec4 Position;"
"out vec4 vertDepthCoord;"
"out vec3 vertLightDir;"
"out vec3 vertViewDir;"
"void main(void)"
"{"
" gl_Position = ModelMatrix * Position;"
" vertDepthCoord = LightMatrix * gl_Position;"
" vertLightDir = LightPosition - gl_Position.xyz;"
" vertViewDir = CameraPosition - gl_Position.xyz;"
"}"
).Compile();
GeometryShader gs;
gs.Source(
"#version 330\n"
"layout (triangles) in;"
"layout (triangle_strip, max_vertices=3) out;"
"uniform mat4 CameraMatrix;"
"in vec4 vertDepthCoord[3];"
"in vec3 vertLightDir[3];"
"in vec3 vertViewDir[3];"
"out vec4 geomDepthCoord;"
"out vec3 geomLightDir;"
"out vec3 geomViewDir;"
"out vec3 geomNormal;"
"void main(void)"
"{"
" geomNormal = normalize("
" cross("
" gl_in[1].gl_Position.xyz-"
" gl_in[0].gl_Position.xyz,"
" gl_in[2].gl_Position.xyz-"
" gl_in[0].gl_Position.xyz "
" )"
" );"
" for(int v=0; v!=3; ++v)"
" {"
" gl_Position = CameraMatrix * gl_in[v].gl_Position;"
" geomDepthCoord = vertDepthCoord[v];"
" geomLightDir = vertLightDir[v];"
" geomViewDir = vertViewDir[v];"
" EmitVertex();"
" }"
" EndPrimitive();"
"}"
).Compile();
FragmentShader fs;
fs.Source(
"#version 330\n"
"uniform sampler2D DepthMap;"
"uniform vec2 DepthOffs[32];"
"const int DepthSamples = 32;"
"const float InvDepthSamples = 1.0 / DepthSamples;"
"in vec4 gl_FragCoord;"
"in vec4 geomDepthCoord;"
"in vec3 geomLightDir;"
"in vec3 geomViewDir;"
"in vec3 geomNormal;"
"out vec3 fragColor;"
"void main(void)"
"{"
" float LightDist = geomDepthCoord.z/geomDepthCoord.w;"
" vec3 Normal = normalize(geomNormal);"
" vec3 LightDir = normalize(geomLightDir);"
" vec3 LightRefl = reflect(-LightDir, Normal);"
" vec3 ViewDir = normalize(geomViewDir);"
" float inv_w = 1.0/geomDepthCoord.w;"
" float Depth = 0.0;"
" for(int s=0; s!=DepthSamples; ++s)"
" {"
" vec2 SampleCoord = DepthOffs[s]+geomDepthCoord.xy;"
" SampleCoord *= inv_w;"
" SampleCoord *= 0.5;"
" SampleCoord += 0.5;"
" float Sample = texture(DepthMap, SampleCoord).r;"
" if(Sample < 0.95)"
" Depth += Sample;"
" else Depth += 0.5;"
" }"
" Depth *= InvDepthSamples;"
" float Ambi = 0.15;"
" float BkLt = (dot(-LightDir, ViewDir)+3.0)*0.25;"
" float SuSS = pow(abs(Depth-LightDist), 2.0)*BkLt*1.2;"
" float Shdw = min(pow(abs(Depth-LightDist)*2.0, 8.0), 1.0);"
" float Diff = sqrt(max(dot(LightDir, Normal)+0.1, 0.0))*0.4;"
" float Spec = pow(max(dot(LightRefl, ViewDir), 0.0), 64.0);"
" vec3 Color = vec3(0.2, 0.9, 0.7);"
" fragColor = (Ambi + Shdw*Diff + SuSS) * Color;"
" fragColor += Shdw*Spec * vec3(1.0, 1.0, 1.0);"
"}"
).Compile();
Program prog;
prog << vs << gs << fs;
prog.Link().Use();
ProgramUniform<Vec2f> depth_offs(prog, "DepthOffs");
for(GLuint i=0; i!=32; ++i)
{
float u = std::rand() / float(RAND_MAX);
float v = std::rand() / float(RAND_MAX);
float x = std::sqrt(v) * std::cos(2*3.1415*u);
float y = std::sqrt(v) * std::sin(2*3.1415*u);
depth_offs[i].Set(x, y);
}
return std::move(prog);
}
public:
Uniform<Mat4f> camera_matrix, light_matrix, model_matrix;
Uniform<Vec3f> camera_position, light_position;
ShapeProgram(void)
: Program(make())
, camera_matrix(prog(), "CameraMatrix")
, light_matrix(prog(), "LightMatrix")
, model_matrix(prog(), "ModelMatrix")
, camera_position(prog(), "CameraPosition")
, light_position(prog(), "LightPosition")
{ }
};
class Shape
: public shapes::ShapeWrapper
{
private:
static shapes::ShapeWrapper load(const char* name)
{
std::ifstream input;
OpenResourceFile(input, "models", name, ".obj");
if(!input.good())
throw std::runtime_error("Error opening file for reading");
return shapes::ShapeWrapper(
shapes::ObjMesh(
input,
shapes::ObjMesh::LoadingOptions(false)
)
);
}
public:
Shape(const char* name)
: shapes::ShapeWrapper(load(name))
{ }
};
class DepthBuffer
{
private:
Context gl;
Texture tex;
Framebuffer fbo;
Renderbuffer rbo;
GLuint side;
public:
: side(tex_side)
{
Texture::Active(tex_unit);
ProgramUniformSampler(prog, "DepthMap").Set(tex_unit);
tex << Texture::Target::_2D
<< images::ImageSpec(
side, side,
);
<< images::ImageSpec(side, side, InternalFormat::R8);
fbo << Framebuffer::Target::Draw
<< FramebufferAttachment::Color << rbo
<< FramebufferAttachment::Depth << tex
<< FramebufferComplete();
}
void SetupViewport(void)
{
gl.Viewport(side, side);
}
void Bind(void)
{
fbo.Bind(Framebuffer::Target::Draw);
}
};
class SubsurfExample : public Example
{
private:
Context gl;
Shape shape;
DepthProgram depth_prog;
ShapeProgram draw_prog;
VertexArray depth_vao, draw_vao;
DepthBuffer depth_buffer;
GLuint width, height;
public:
SubsurfExample(void)
: gl()
, shape("stanford_dragon")
, depth_prog()
, draw_prog()
, depth_vao(shape.VAOForProgram(depth_prog))
, draw_vao(shape.VAOForProgram(draw_prog))
, depth_buffer(draw_prog, 0, 1024)
{
gl.Enable(Capability::DepthTest);
gl.Enable(Capability::CullFace);
gl.CullFace(Face::Back);
gl.PolygonOffset(1.0f, 1.0f);
}
void Reshape(GLuint vp_width, GLuint vp_height)
{
width = vp_width;
height = vp_height;
}
{
GLfloat bs_rad = shape.BoundingSphere().Radius()*1.2f;
auto light =
shape.BoundingSphere().Center(),
shape.BoundingSphere().Radius()*10.0,
FullCircles(time / 23.0),
Degrees(35 + SineWave(time / 31.0) * 50)
);
GLfloat lgt_tgt_dist = Distance(
shape.BoundingSphere().Center(),
light.Position()
);
auto lgt_proj =
ArcSin(bs_rad/lgt_tgt_dist)*2,
1.0f,
lgt_tgt_dist-bs_rad,
lgt_tgt_dist+bs_rad
);
auto camera =
shape.BoundingSphere().Center(),
shape.BoundingSphere().Radius()*2.8,
FullCircles(time / 17.0),
Degrees(SineWave(time / 19.0) * 80)
);
GLfloat cam_tgt_dist = Distance(
shape.BoundingSphere().Center(),
camera.Position()
);
auto cam_proj =
ArcSin(bs_rad/cam_tgt_dist)*2,
double(width)/height,
cam_tgt_dist-bs_rad,
cam_tgt_dist+bs_rad
);
auto model =
ModelMatrixf::Translation(0.0f,-bs_rad*0.25f, 0.0f);
depth_vao.Bind();
depth_prog.Use();
depth_prog.camera_matrix.Set(lgt_proj*light);
depth_prog.model_matrix.Set(model);
depth_buffer.SetupViewport();
depth_buffer.Bind();
gl.ClearColor(0.0f, 0.0f, 0.0f, 0.0f);
gl.ClearDepth(1.0f);
gl.Clear().ColorBuffer().DepthBuffer();
gl.Enable(Capability::PolygonOffsetFill);
shape.Draw();
//
draw_vao.Bind();
draw_prog.Use();
draw_prog.camera_matrix.Set(cam_proj*camera);
draw_prog.light_matrix.Set(lgt_proj*light);
draw_prog.model_matrix.Set(model);
draw_prog.camera_position.Set(camera.Position());
draw_prog.light_position.Set(light.Position());
DefaultFramebuffer().Bind(Framebuffer::Target::Draw);
gl.Viewport(width, height);
gl.ClearColor(0.2f, 0.2f, 0.2f, 0.0f);
gl.ClearDepth(1.0f);
gl.Clear().ColorBuffer().DepthBuffer();
gl.Disable(Capability::PolygonOffsetFill);
shape.Draw();
}
{
return time < 90.0;
}
double ScreenshotTime(void) const
{
return 29.0;
}
};
void setupExample(ExampleParams& /*params*/){ }
std::unique_ptr<ExampleThread> makeExampleThread(
Example& /*example*/,
unsigned /*thread_id*/,
const ExampleParams& /*params*/
){ return std::unique_ptr<ExampleThread>(); }
std::unique_ptr<Example> makeExample(const ExampleParams& /*params*/)
{
return std::unique_ptr<Example>(new SubsurfExample);
}
} // namespace oglplus
Copyright © 2010-2014 Matúš Chochlík, University of Žilina, Žilina, Slovakia.
<matus.chochlik -at- fri.uniza.sk>
<chochlik -at -gmail.com>
Documentation generated on Mon Sep 22 2014 by Doxygen (version 1.8.6).
<matus.chochlik -at- fri.uniza.sk>
<chochlik -at -gmail.com>
Documentation generated on Mon Sep 22 2014 by Doxygen (version 1.8.6).